Program Coordinator at FRC Team 4955 LA Tech
As a full-time student, I helped Lakeside Academy found the team in the 2014 FIRST Robotics Competition season. We went from having absolutely no experience in robotics to finishing Ethel, our first robot, in under two months.
I served as the leader of the 40-person team responsible for integrating the Mechanical, Software, Electrical functions into our robots. In particular, I was most involved in the Mechanical side, completing most of the detail design using SolidWorks with custom as well as COTS parts. I also coordinated the six-week build seasons from a project management perspective, handling priorities, timeline, and budgeting.
At the same time, I focused on long-term sustainability of the team by installing a positive team culture, creating a friendly environment, and helping members learn useful skills. It was really important for me to maximize student learning from the robots, and not necessarily the competitive edge. This meant that we tried to build the robots to incorporate as many functions as possible given our resources. Under my leadership, we went from zero to multi-function robot in one season, and saw 100% return rate the next.
Ethel
Ethel competed in the game Aerial Assist. It can score in both the high goal and and low goal reliably with its high-torque intake roller, pneumatic lifter, and spring-loaded launcher.

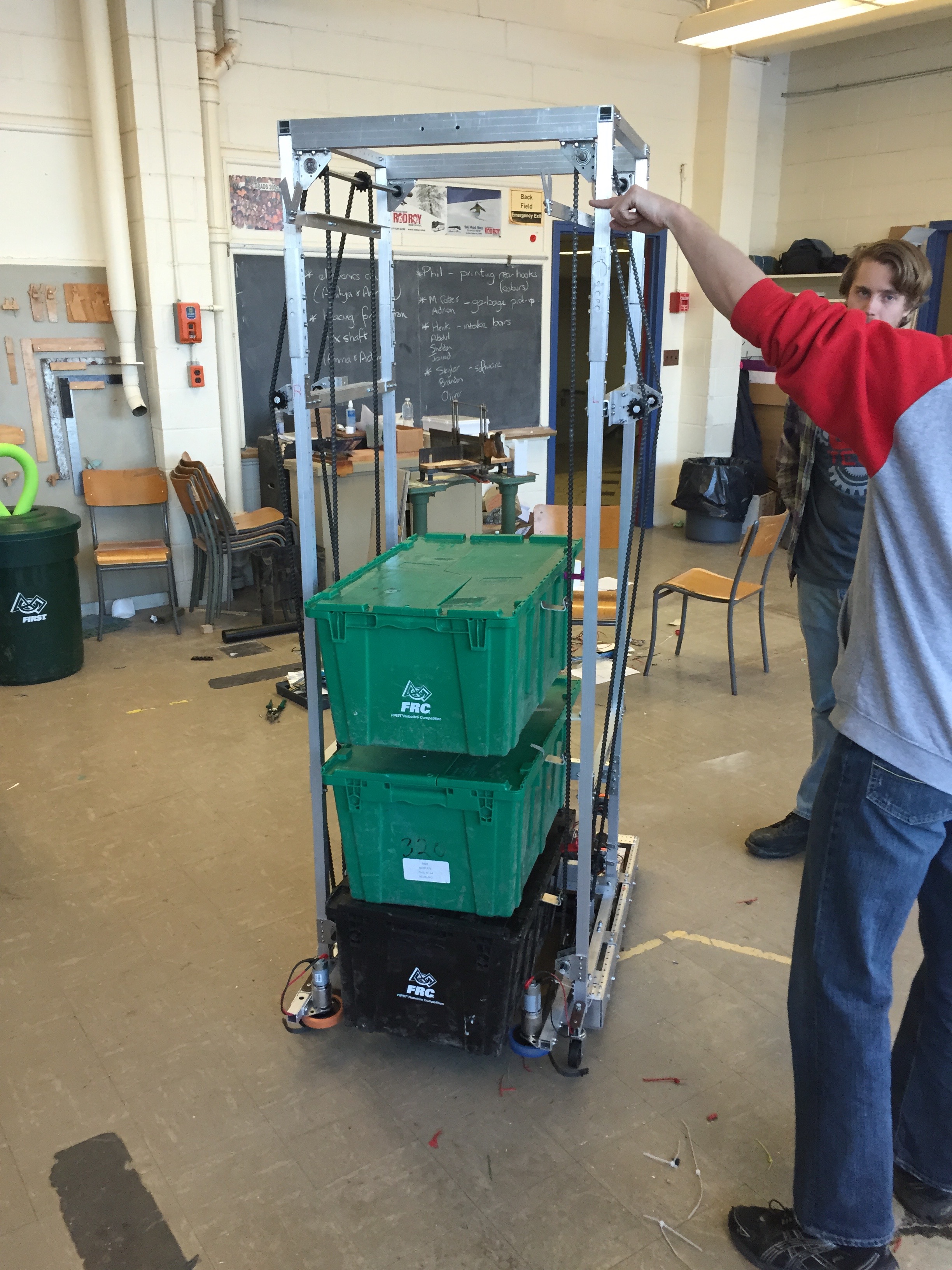
Watson
Watson competed in Recycle Rush. It can pick up and stack three totes and a bin. It has a reliable tote intake, a double geared motor elevator, and an encoder-based chain timing system.

Simulating a One-Dimensional Gas With Suspended Magnets
I completed an honours mechanical engineering thesis under Prof. Andrew Higgins. It can be viewed here (PDF warning). As a part of the thesis, three projects were completed - listed below.
MATLAB Particle Tracker
With the help of open-source algorithms, I developed a user-friendly MATLAB application that could reliably and accurately track particles in videos.
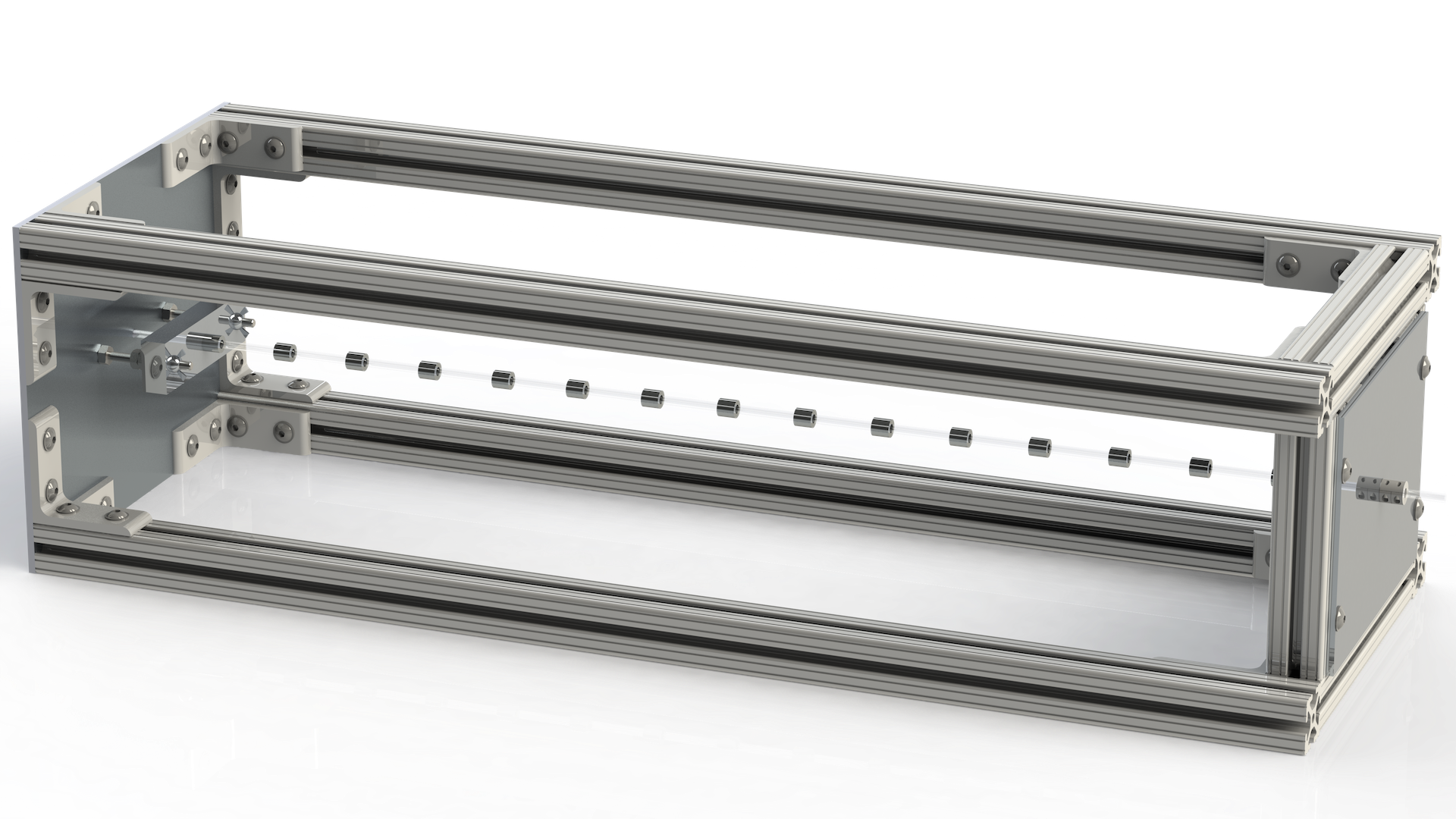
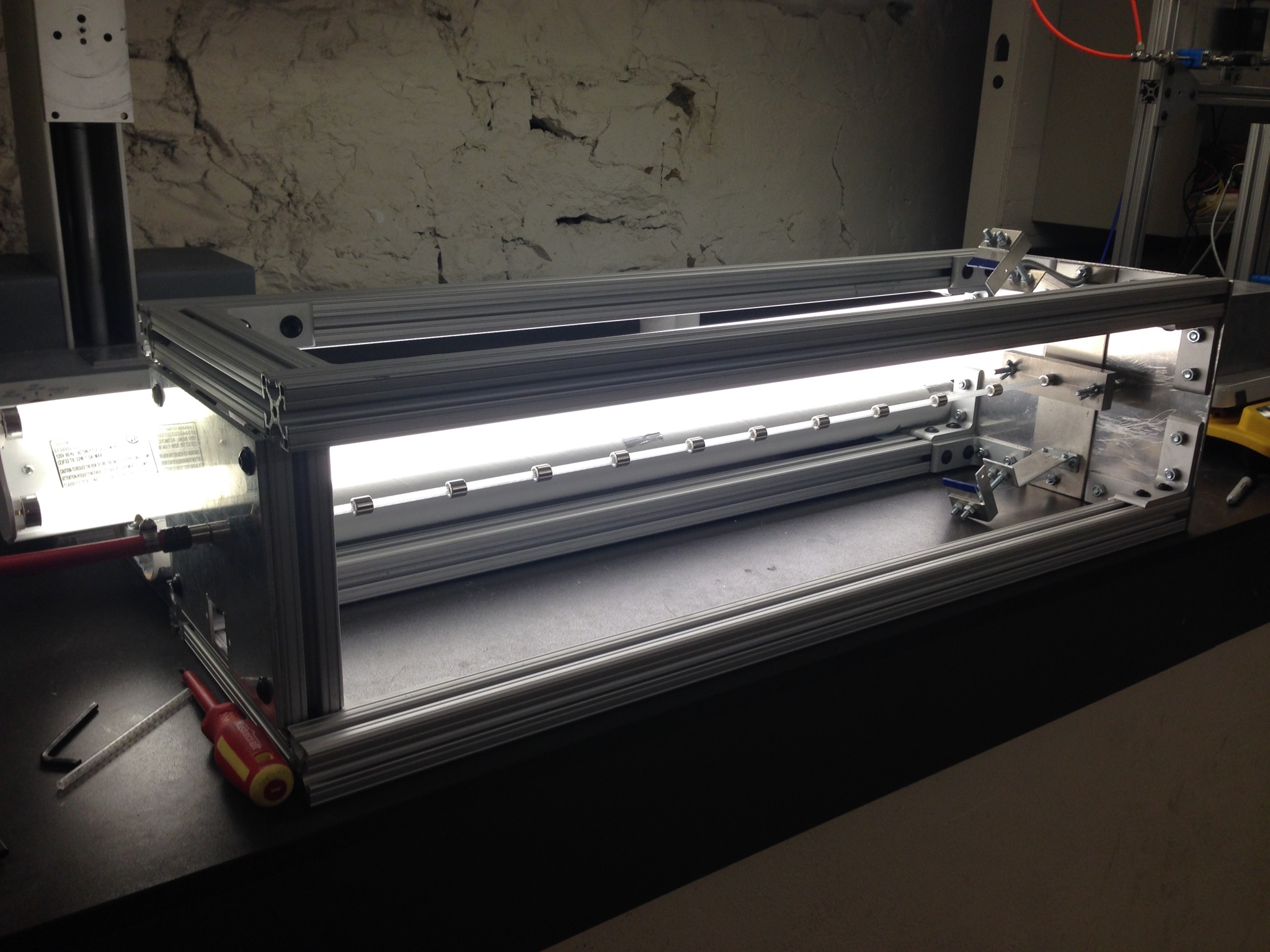
Magnets Suspension Device
We were able to suspend magnets using an air-bearing mechanism. This allowed free magnetic interaction without friction - a key requirement for the success of the study.
MATLAB Numerical Simulator for Nonlinear Interaction
I also developed a numerical simulator used to compare theoretical trajectories with ones observed with image analysis. I will clean up the code and host it on GitHub soon.

Super Smashteroids
A silly little game we developed in Java. It has multi player and level progression.